內嵌ST4自動導星接口
GPM662C內建標準ST4導星接口,可直接連接到赤道儀的ST4導星端口,無需額外的轉接設備。這種設計簡化了導星系統的配置,減少了線纜連接,提高了系統的可靠性。配合主流導星軟體如PHD2、MetaGuide等,實現精準的自動導星控制。

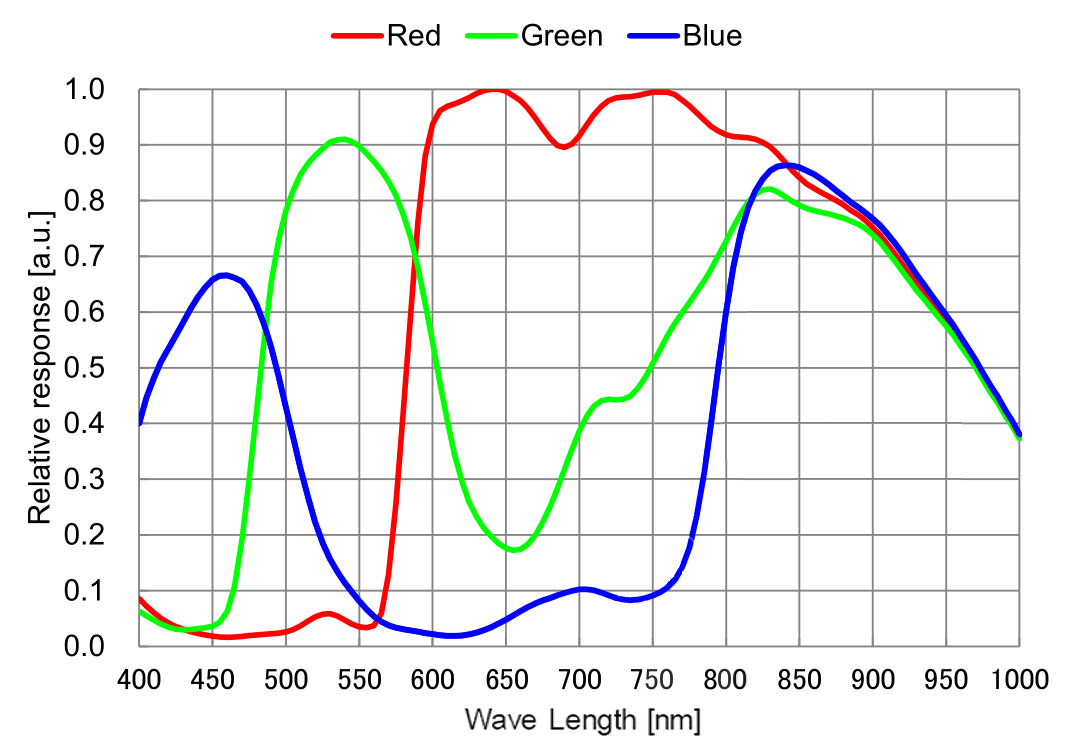
搭載索尼IMX662 最新一代背照式CMOS感測器的專業彩色導星相機,具備超低讀取雜訊和卓越的紅外線響應能力,為精確導星和行星成像提供頂級性能。 GPM662C相機搭載索尼最新的IMX662感測器,具有高效的紅外線波段光捕捉能力,其在650nm處具有非常高的QE值,峰值量子效率超過91%。配備HCG/LCG雙增益模式切換,最低讀取雜訊可達0.48e⁻,是目前市面上讀取雜訊最低的彩色導星相機之一。高達39ke⁻的滿井容量和75.2dB的動態範圍,使得GPM662C在自動導星、日面攝影和月面攝影中都有著卓越的性能表現。 GPM662C採用索尼最新的IMX662感測器,相比前代IMX462有顯著提升。讀取雜訊降低至0.48e⁻,滿井容量提升至39ke⁻,動態範圍達75.2dB。這些改進使GPM662C成為目前性能最優異的彩色導星相機之一,特別適合需要高動態範圍和極低雜訊的應用場景。 GPM662C的感測器G靈敏度為5970mv,1/30s。其光譜響應範圍達380-690nm(紅外線截止玻璃),在650nm處具有極高的量子效率,峰值量子效率超過91%。這種優異的光譜響應特性確保了在各種觀測條件下都能獲得穩定的導星性能,特別是在紅光波段表現卓越。 GPM662C支援HCG(高轉換增益)和LCG(低轉換增益)兩種模式切換,為不同的導星場景提供最最佳化的效能表現: 幀緩存是相機內建的高速記憶體,用於暫時儲存擷取的影像資料。它就像一個智慧的"緩衝區",在感測器和電腦之間起到橋樑作用。 GPM662C採用原生12位元ADC,提供4096等級灰階,相較於8位元的256階灰度,能夠捕捉更豐富的影像細節。相機支援硬體ROI(感興趣區域)功能,ROI尺寸越小,幀率越高,這在導星應用中特別有用,可以只選擇包含導星的小區域進行高速擷取。 單位:幀/秒(FPS) - USB2.0接口 GPM662C支援從1×1 到8×8 的數位像素合併(堆疊或平均方法)。像素合併技術可以提高訊號雜訊比,在暗弱導星條件下特別有用,透過合併相鄰像素來增強導星訊號,同時降低讀取雜訊的影響。 GPM662C內建標準ST4導星接口,可直接連接到赤道儀的ST4導星端口,無需額外的轉接設備。這種設計簡化了導星系統的配置,減少了線纜連接,提高了系統的可靠性。配合主流導星軟體如PHD2、MetaGuide等,實現精準的自動導星控制。 GPM662C支援Native、ASCOM、WDM等多種驅動接口,相容於PHD Guiding、NINA、INDI、MaxIm DL、Nebulosity、MetaGuide等主流天文軟體。提供Windows、Linux、macOS等多平台SDK支持,包含Native C/C++、C#/VB.NET、Python、Java等開發介面。 相機透過USB 2.0 Type-C介面取得供電,無需外接電源。一旦使用USB數據線與主控系統建立連接,該相機即準備好進行工作。這種設計特別適合野外觀測,減少了電源線纜的複雜性。 GPM662C提供HCG和LCG兩種增益模式,可依不同的導星需求靈活切換,在各種條件下都能提供優異的性能表現。 相機設定:全分辨率,RAW 12位元模式,LCG模式 LCG模式提供超大的滿井容量(39.034ke⁻),是目前同類產品中最高的。 此模式在保持良好信噪比的同時,提供了極寬的動態範圍(75.2dB), 能夠避免在明亮目標上過曝,特別適合日面、月面攝影和明亮行星成像。 相機設定:全分辨率,RAW 12位元模式,HCG模式 HCG模式專為低光導星優化,提供極低的讀取雜訊(最低0.48e⁻), 這是目前彩色導星相機中的最低水準。在高增益設定下,讀取雜訊保持在0.48e⁻, 非常適合捕捉極其暗弱的導星,在深空天體拍攝中表現尤為出色。 包裝盒尺寸:長19.5cm × 寬16cm × 高6cm(每個成品包裝總計約0.8-1.0公斤)

功能描述
GPM662C的特性如下:
核心特性
0.48 e⁻
極低讀取噪聲
業界領先的低噪音水平
39 ke⁻
超大滿井容量
卓越的動態範圍表現
> 91%
量子效率峰值
極高的光電轉換能力
75.2 dB
動態範圍
捕捉更多明暗細節
HCG/LCG
雙增益模式
靈活適應不同場景
ST4
導星介面
直連赤道儀,精準導星技術優勢
索尼IMX662新一代感測器技術
索尼IMX662光譜響應曲線
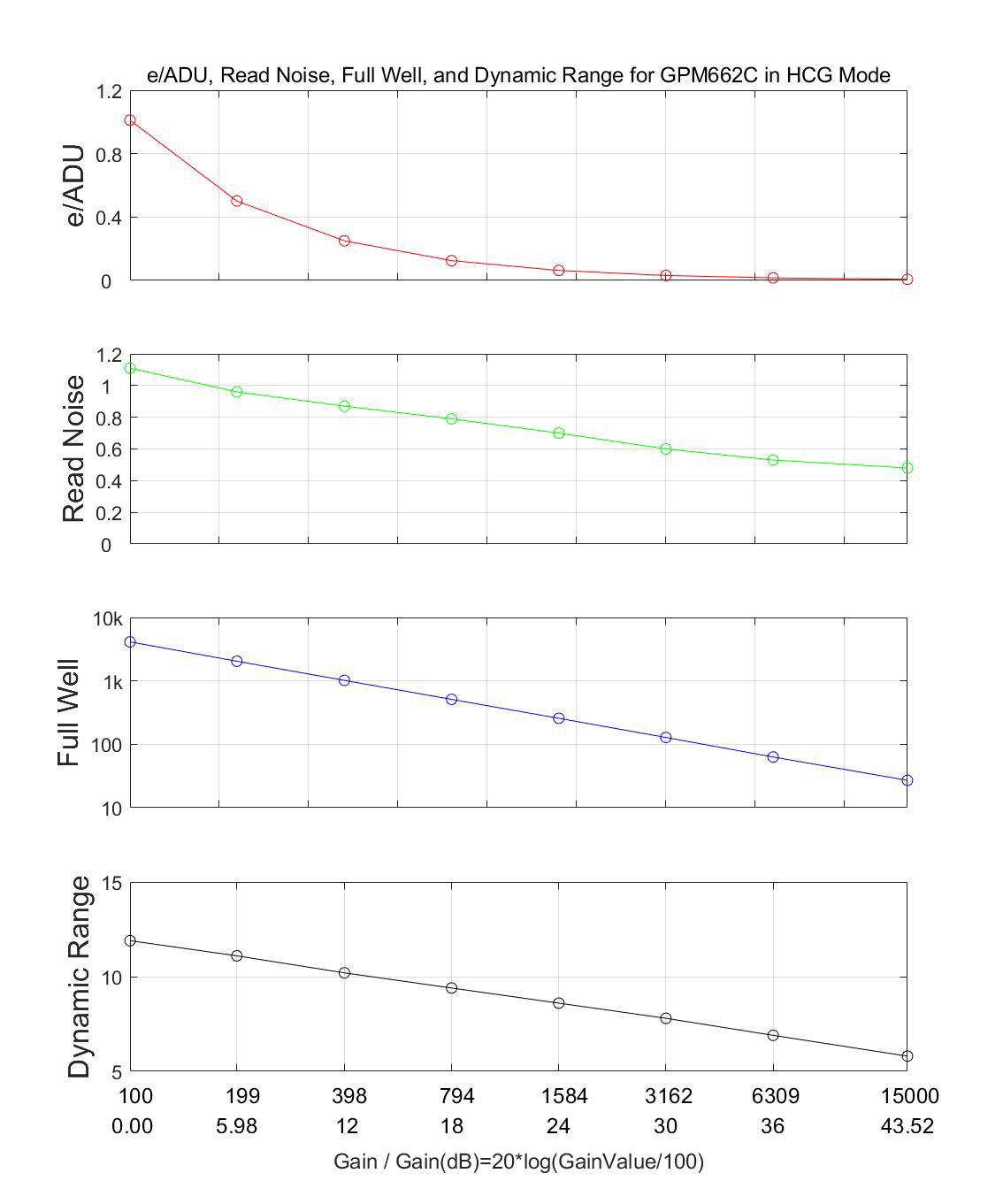
HCG/LCG雙增益模式
HCG高轉換增益模式
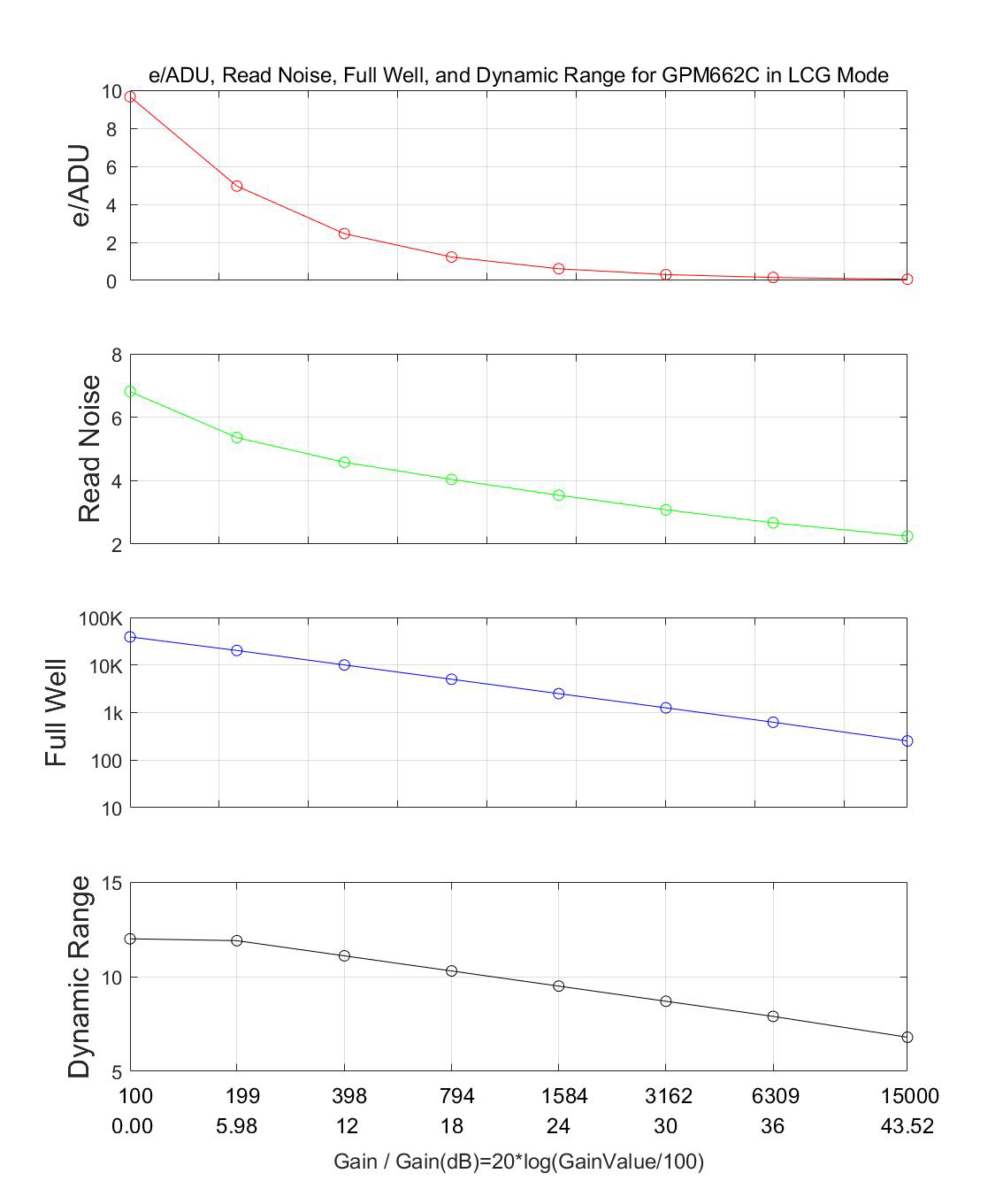
LCG低轉換增益模式
智慧幀緩存技術
什麼是幀緩存?
幀緩存的優勢:
12位元ADC 和智慧ROI
不同解析度/位元寬/資料傳輸介面時的速率
靈活的像素合併
內嵌ST4自動導星接口

廣泛的軟體相容性
便捷的供電系統
性能分析
LCG低轉換增益模式效能
LCG模式關鍵效能數據
增益值
100
398
1584
6309
15000
對數增益(dB)
0.00
12
24
36
43.52
e-/ADU
9.659
2.46
0.614
0.154
0.062
讀出噪音(e⁻)
6.81
4.58
3.54
2.67
2.25
滿井電荷(ke⁻)
39.034
10.035
2.503
0.627
0.253
動態範圍(stop)
12
11.1
9.5
7.9
6.8
HCG高轉換增益模式效能
HCG模式關鍵效能數據
增益值
100
398
1584
6309
15000
對數增益(dB)
0.00
12
24
36
43.52
e-/ADU
1.011
0.25
0.063
0.016
0.007
讀出噪音(e⁻)
1.11
0.87
0.70
0.53
0.48
滿井電荷(ke⁻)
4.123
1.018
0.257
0.063
0.027
動態範圍(stop)
11.9
10.2
8.6
6.9
5.8
技術規格
核心性能參數
最大幀率(USB 2.0)
12位:8.9 FPS @ 1920×1080
8位:17.8 FPS @ 1920×1080
讀取噪音
HCG: 0.48-1.11e⁻ | LCG: 2.25-6.81e⁻
滿井電荷
HCG: 4.123ke⁻ | LCG: 39.034ke⁻
量子效率峰值
>91%
動態範圍
75.2 dB
信噪比
45.9 dB
曝光時間範圍
0.1毫秒- 1000秒
增益範圍
1× - 150×
基礎技術規格
感應器
索尼IMX662 彩色背照式CMOS
影像解析度
210萬像素(1920×1080)
像素尺寸
2.9μm × 2.9μm
感測器尺寸
1/2.8吋(對角線6.45mm)
影像區域
5.57mm × 3.13mm
快門類型
捲簾快門
ADC位深
12位
幀緩存
內建
增益模式
HCG/LCG雙模式切換
光譜響應範圍
380-690nm(附紅外線截止玻璃)
介面與物理規格
資料介面
USB 2.0 Type-C
導星介面
內嵌ST4自動導星接口
相機介面
1.25吋外徑適配望遠鏡
標準CS接口適配工業鏡頭
後截距
8.5mm(搭配C介面達17.5mm,搭配CS介面達12.5mm)
保護視窗
紅外線截止濾光片/增透窗口
外形尺寸
直徑37mm × 高72.4mm
重量
65.3克
散熱方式
被動散熱
支援系統
Windows XP/Vista/7/8/10/11
Mac OS X、Linux
SDK支援
Native C/C++、C#/VB.NET、Python
Java、DirectShow、Twain等相機接口與尺寸
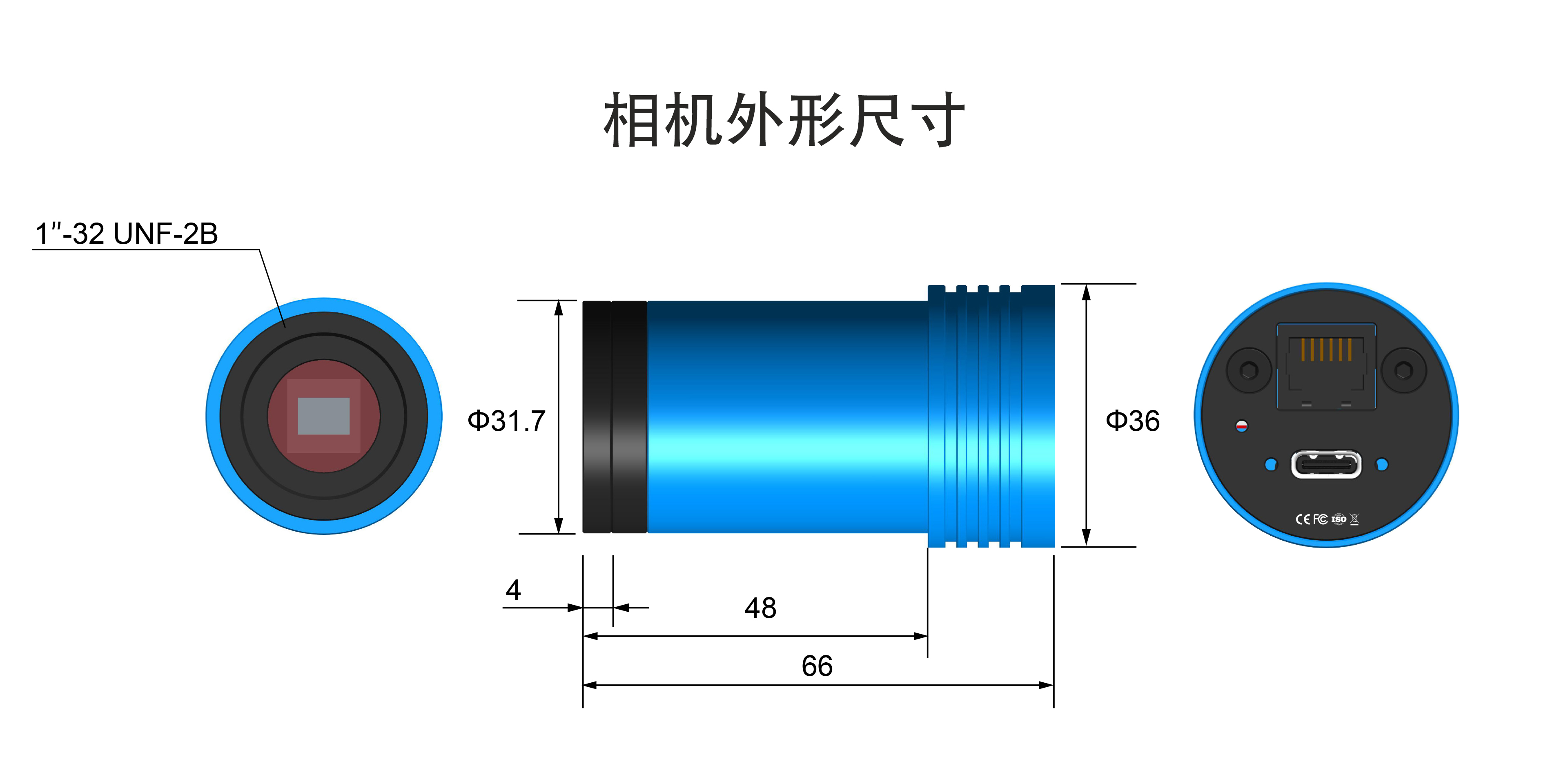
介面說明
包裝內容

標準配置包含:
AGPM662C彩色導星相機主體(配標準CS介面)× 1
BUSB 2.0線(2米,Type-A to Type-C)× 1
CST4導星線(2公尺)× 1
D1.25吋延長筒× 1
E5mm接圈× 1